1. Simulator Structure
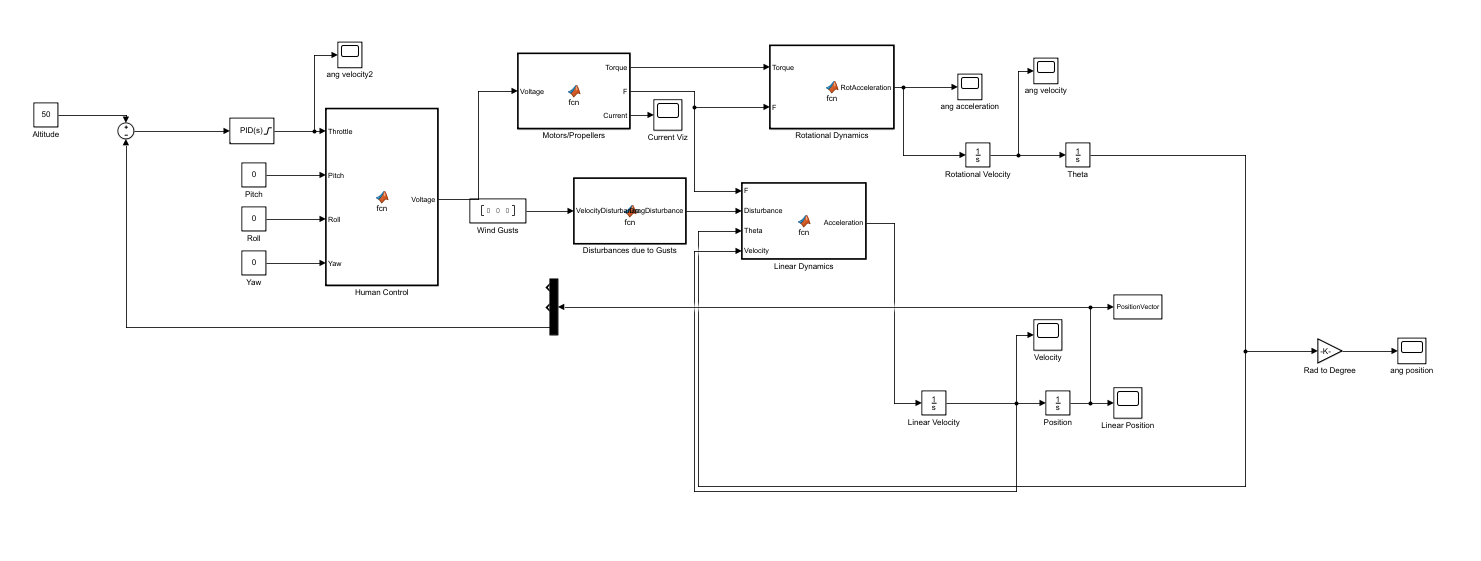
Simulated quadcopter model using Matlab Simulink. The simulator consists of sub-parts, propeller, rotational dynamics and linear dynamics. EachSub-parts
Propeller
Propeller's torque, force and current change according to voltage
Rotational Dynamics
Drone's moment of inertia according to torque and force
Linear Dynamics
Acceleration of drone according to force, angle and velocitySet Starting Position
Change starting position from coordinate system2. Simulator
- Open loop simulator

- Close loop simulator - Z axis

- Close loop simulator - X, Y, Z axis



Comments
Post a Comment